Physically-based Approach
The physically-based approach would seem to complement motion bending, as it excels at what motion blending fails to achieve. In the motion blending section it was discovered that the technique was very good at creating extremely realistic variations of similar actions by capturing the nuisances of human movement, but its failure was the limitations of the motion library and the extent of the synthesised motion.
Physics-based methods do not rely on a large motion library, but instead incorporate biomechanical information, such as; using some muscles more than others, elastic mechanisms at joints due to the mechanical properties of tendons, ligaments, and muscles, and variable stiffness at joints depending on the task. This means that it ideal at creating highly dynamic movements.
"Due to the complexity of biological motion … we introduce Nonlinear Inverse Optimisation (NIO), a novel algorithm for estimating optimisation parameters from motion capture data. Our method can extract the physical parameters from a single short motion sequence. Once captured, this representation of style is extremely flexible: motions can be generated in the same style but performing different tasks, and styles may be edited to change the physical properties of the body.", Liu et al (2004).
For a description of the Nonlinear Inverse Optimisation algorithm, click here.
Obviously due to the intended requirement of the motion, the level of biomechanical data can be scaled up and down, but it is all based around the same concept of calculating the total amount of torque due to forces at each joint. These forces are both internal and external: muscle torques, gravity, spring forces, internal elastic forces, ground contact forces and shoe elastic forces.
 |
||||||||
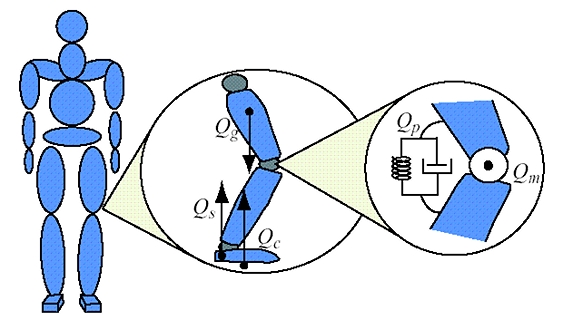
Learning Physics-Based Motion Style with NIO, Liu et al (2004)
The diagram above is taken from Liu et al (2004) and shows how the aggregate generalised force acting on joint j is calculated: Muscles (Qmj), gravity (Qgj), passive springs and dampers (Qpj), ground contact (Qcj), and shoe springs (Qsj). The aggregate spring force from the passive elements (Qpj) is illustrated as a spring and a damper, and the active muscle force (Qmj), is illustrated as a motor. By manipulating these forces it could be possible to create different physical attributes for each character. For example, by varying muscle/tendon elastic properties it could convey fatigue, injury and superhuman strength. In a similar line of testing Liu et al illustrated dyanmic editing by taking a standard character walking motion and applied a mass to the character's right hand to represent a 3 kilogram suitcase. As a result, the character leaned to the left to counteract the weight and swung their right arm much less than before. This example shows the massive potential for applying different objects for crowds to carry. Weapons could be added to characters at a later date, rather than having to motion capture specific moves with each type of weapon and thus the array of different weapons could be unrestricted.
Another failure of motion blending is that it cannot really apply emotions to movements, unless every possible emotion in a wide array of movements is captured. Massive, the crowd simulation software states that its agents have their own emotions, by running away if scared and performing better if they are happy, but do their motions match their actions. Running away can show you are scared, but if the motion appears to be a happy, bouncing run, then it can destroy the whole illusion of the emotion. By applying a learning algorithm as suggested by Liu et al, it is possible to learn an "sad" style, for example, from a captured walking sequence and then synthesise this "sad" style into other motions.
A common problem in crowd simulations is getting the character to look real while walking over uneven terrain. Each technique covered in this website has its own version of solving this problem, but the physically-based approach provides perhaps the most realistic motion, without motion capturing every possible uneven terrain scenario. Below is another of Liu et al's tests to illustrate how by taking a capture of an actor walking on a level surface it can be turned into a 'walking up a ramp' motion. As a comparison, they included a motion warping example based on the foot steps constraints provide by a capture of an actor walking up a ramp. Using a standard walking motion on level ground they synthesised a new motion with the same footstep constraints as the captured uphill motion.
Learning Physics-Based Motion Style with NIO, Liu et al (2004)
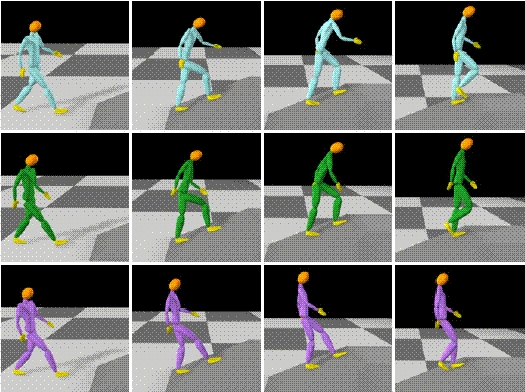
The test showed that their method (middle) of using a style learned from walking on a level surface predicted almost identically that of the motion capture (top). Their method accurately predicted the overall dynamic nature of the motion, such as leaning into the slope and exerting more force at each step. The motion created by motion warping (bottom) satisfied the foot constraints, but left the motion looking unrealistic since the character appears still to be walking in a level ground style and not following the dynamic properties.
So why does this technique not get used in current crowd systems?
The current research into physically-based approaches of character motion is still fairly young and nearly all the tests are based on one character at a time, due to the technique being computationally expensive. As discovered earlier, the aspects of real-life physics are abstracted away from the model to a certain extent and varying levels of complexity can be implemented as required, but this tends to mean that the optimisation only produces good results for high-energy motions, because these motions are constrained by the laws of physics. Whereas, the low-energy motions, which motion blending is so good at creating, depend more on the fine detail of the physical model, since there are many ways to perform these motions (e.g. walking, running) while still satisfying the constraints.